Name
Mapper_MRPT
Brief
Mapper RTC using MRPT (Mobile Robot Programming Toolkit)
Description
RT-component for SLAM (Simaltaneously Localization and Mapping) algorithm using MRPT (Mobile Robot Programming Toolkit). If you want to know about MRPT, see http://mrpt.org This RT-Component supports only 3 patterns of ICP SLAM. (Actually MRPT supports other types of SLAM). Use with NavigationManager, and Mobile Robot which has common interface for mobile robot. To build this component, please install mrpt-1.3.0. In windows, binary installing is recommended. Please see official website of mrpt.
License
GPL
Image
Language
C++
URL
https://github.com/sugarsweetrobotics/Mapper_MRPT.git
Platform
[‘win’, ‘ubuntu’]
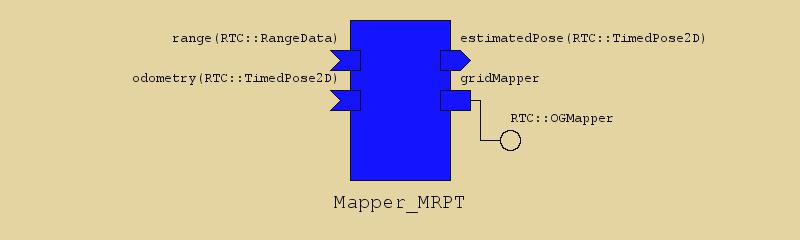
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| range | RTC::RangeData | Input for Ranger Data (LiDAR sensors.) | |
| odometry | RTC::TimedPose2D | Input for odometry of mobile robot. |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| estimatedPose | RTC::TimedPose2D | meter, rad | Estimated pose of robot with SLAM algorithm (ICP) |
Service Ports
gridMapper
This port provides the services for Mapper. Please see MobileRobot.idl to know more about the interface. Ths port provides OGMapper service.
| Name | Direction | Type | Description |
|---|---|---|---|
| OGMapper | Provided | RTC::OGMapper | This port provides the services for Mapper. Please see MobileRobot.idl to know more about the interface. Ths port provides OGMapper service. |
Configurations
| Name | Type | Default | Unit | Description |
|---|---|---|---|---|
| debug | int | 0 | For Debug, set 1 to get verbosity output on console. | |
| start_map_update_in_activated | string | false | If true, | |
| ICP_algorithm | string | icpClassic | Select algorithm of ICP mapping. icpClassic, icpLevenbergMarquardt, icpIKF | |
| ICP_onlyClosestCorrespondences | string | true | The usual approach: to consider only the closest correspondence for each local point (Default to true) | |
| ICP_onlyUniqueRobust | string | false | Apart of “onlyClosestCorrespondences=true”, if this option is enabled only the closest correspondence for each reference point will be kept (default=false). | |
| ICP_maxIterations | unsigned int | 80 | Maximum number of iterations to run. | |
| ICP_minAbsStep_trans | float | 0.000001 | If the correction in all translation coordinates (X,Y,Z) is below this threshold (in meters), iterations are terminated (Default:1e-6) | |
| ICP_minAbsStep_rot | float | 0.000001 | If the correction in all rotation coordinates (yaw,pitch,roll) is below this threshold (in radians), iterations are terminated (Default:1e-6) | |
| ICP_thresholdDist | float | 0.2 | Initial threshold distance for two points to become a correspondence. | |
| ICP_thresholdAng | float | 0.1745 | Initial threshold distance for two points to become a correspondence. | |
| ICP_ALFA | float | 0.8 | The scale factor for threshold everytime convergence is achieved. | |
| ICP_smallestThresholdDist | float | 0.05 | The size for threshold such that iterations will stop, since it is considered precise enough. | |
| ICP_covariance_varPoints | float | 0.0004 | This is the normalization constant \sigma^2_p that is used to scale the whole 3×3 covariance. This has a default value of (0.02)^2 , that is, a 2cm sigma. | |
| ICP_doRANSAC | string | false | Perform a RANSAC step after the ICP convergence, to obtain a better estimation of the pose PDF. | |
| ICP_ransac_nSimulations | unsigned int | 100 | RANSAC-step options | |
| ICP_ransac_minSetSize | unsigned int | 5 | RANSAC-step options | |
| ICP_ransac_maxSetSize | unsigned int | 20 | RANSAC-step options | |
| ICP_ransac_mahalanobisDistanceThreshold | float | 3.0 | RANSAC-step options | |
| ICP_ransac_normalizationStd | float | 0.2 | RANSAC-step option: The standard deviation in X,Y of landmarks/points which are being matched (used to compute covariances in the SoG) | |
| ICP_ransac_fuseByCorrsMatch | string | false | RANSAC-step option: The standard deviation in X,Y of landmarks/points which are being matched (used to compute covariances in the SoG) | |
| ICP_ransac_fuseMaxDiffXY | float | 0.01 | RANSAC-step option: The standard deviation in X,Y of landmarks/points which are being matched (used to compute covariances in the SoG) | |
| ICP_ransac_fuseMaxDiffPhi | float | 0.001745 | RANSAC-step option: The standard deviation in X,Y of landmarks/points which are being matched (used to compute covariances in the SoG) | |
| ICP_kernel_rho | float | 0.07 | Cauchy kernel rho, for estimating the optimal transformation covariance, in meters (default = 0.07m). | |
| ICP_use_kernel | string | true | Whether to use kernel_rho to smooth distances, or use distances directly (default=true) | |
| ICP_Axy_aprox_derivatives | float | 0.05 | The size of the perturbance in x & y used to estimate the Jacobians of the square error (in LM & IKF methods, default=0.05). | |
| ICP_LM_initial_lambda | float | 0.0001 | The initial value of the lambda parameter in the LM method (default=1e-4). | |
| ICP_skip_cov_calculation | string | false | Skip the computation of the covariance (saves some time) (default=false) | |
| ICP_skip_quality_calculation | string | true | Skip the (sometimes) expensive evaluation of the term ‘quality’ at ICP output (Default=true) | |
| ICP_corresponding_points_decimation | unsigned int | 5 | Decimation of the point cloud being registered against the reference one (default=5) – set to 1 to have the older (MRPT <0.9.5) behavior of not approximating ICP by ignoring the correspondence of some points. The speed-up comes from a decimation of the number of KD-tree queries, the most expensive step in ICP. | |
| ICP_matchAgainstTheGrid | string | 0 | (default:false) Match against the occupancy grid or the points map? The former is quicker but less precise. | |
| ICP_insertionLinDistance | double | 0.5 | meter | Minimum robot linear (m) displacement for a new observation to be inserted in the map. |
| ICP_insertionAngDistance | double | 0.8 | rad | Minimum robot angular (rad, deg when loaded from the .ini) displacement for a new observation to be inserted in the map. |
| ICP_localizationLinDistance | double | 0.5 | meter | Minimum robot linear (m) displacement for a new observation to be used to do ICP-based localization (otherwise, dead-reckon with odometry). |
| ICP_localizationAngDistance | double | 0.8 | rad | Minimum robot angular (rad, deg when loaded from the .ini) displacement for a new observation to be used to do ICP-based localization (otherwise, dead-reckon with odometry). |
| ICP_minICPgoodnessToAccept | float | 0.40 | Minimum ICP goodness (0,1) to accept the resulting corrected position (default: 0.40) | |
| MAP_min_x | float | -10.0 | Initial size of Occupancy Grid Map | |
| MAP_max_x | float | 10.0 | meter | Initial size of Occupancy Grid Map |
| MAP_min_y | float | -10.0 | meter | Initial size of Occupancy Grid Map |
| MAP_max_y | float | 10.0 | meter | Initial size of Occupancy Grid Map |
| MAP_resolution | float | 0.05 | meter | Resolution of Grid Map. Length of the grid |
| MAP_insertion_mapAltitude | float | 0.0 | meter | The altitude (z-axis) of 2D scans (within a 0.01m tolerance) for they to be inserted in this map! |
| MAP_insertion_useMapAltitude | string | false | The parameter “mapAltitude” has effect while inserting observations in the grid only if this is true. | |
| MAP_insertion_maxDistanceInsertion | float | 15 | The largest distance at which cells will be updated (Default 15 meters) | |
| MAP_insertion_maxOccupancyUpdateCertainty | float | 0.55 | A value in the range [0.5,1] used for updating cell with a bayesian approach (default 0.8) | |
| MAP_insertion_considerInvalidRangesAsFreeSpace | string | true | If set to true (default), invalid range values (no echo rays) as consider as free space until “maxOccupancyUpdateCertainty”, but ONLY when the previous and next rays are also an invalid ray. | |
| MAP_insertion_decimation | unsigned short int | 1 | Specify the decimation of the range scan (default=1 : take all the range values!) | |
| MAP_insertion_horizontalTolerance | float | 0 | The tolerance in rads in pitch & roll for a laser scan to be considered horizontal, then processed by calls to this class (default=0). | |
| MAP_insertion_CFD_features_gaussian_size | float | 1 | Gaussian sigma of the filter used in getAsImageFiltered (for features detection) (Default=1) (0:Disabled) | |
| MAP_insertion_CFD_features_median_size | float | 3 | Size of the Median filter used in getAsImageFiltered (for features detection) (Default=3) (0:Disabled) | |
| MAP_insertion_wideningBeamsWithDistance | string | false | Enabled: Rays widen with distance to approximate the real behavior of lasers, disabled: insert rays as simple lines (Default=false) | |
| initial_pose_x | double | 0.0 | Initial Pose of Robot | |
| initial_pose_y | double | 0.0 | meter | Initial Pose of Robot |
| initial_pose_phi | double | 0.0 | rad | Initial Pose of Robot |
How To Build
Linux
$ git clone https://github.com/sugarsweetrobotics/Mapper_MRPT.git $ cd Mapper_MRPT $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create Mapper_MRPT_test_project # You can also use other preinstalled package $ wasanbon-cd Mapper_MRPT_test_project $ ./mgr.py repository clone Mapper_MRPT $ ./mgr.py rtc build Mapper_MRPT $ ./mgr.py rtc run Mapper_MRPT # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Success (2015-01-23 10:25:21.799000)
Build in OSX
Not available
Build in Linux
Failed (2015-01-22 20:35:05.493615)
Copyright
Sugar Sweet Robotics