Name
VS_ASR_RTC
Brief
VStone Academic Scala Robot
Description
V-STONE Academic Scala Robot RT-component. This is driver RT-component for the device. This RT-component depends on CP2110 software. Please download and install from here: http://jp.silabs.com/products/interface/Pages/CP2110EK.aspx
To launch this RTC, 2 dlls (SILABHIDtoUART.dll, SILABHIDDevice.dll) are needed. Must place on C:\Windows\SysWOW64 or current directory. Usually, the dlls are installed in C:\Silabs\MCU\CP2110\Library\Windows\x86.
License
MIT License
Image
Language
C++
URL
https://github.com/sugarsweetrobotics/VS_ASR_RTC
Platform
Data In Ports
| Name | Type | Unit | Description |
|---|
Data Out Ports
| Name | Type | Unit | Description |
|---|
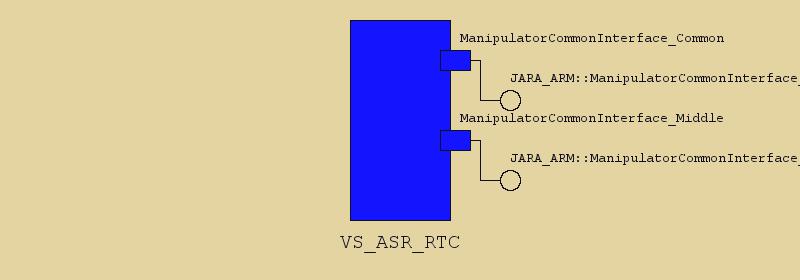
Service Ports
ManipulatorCommonInterface_Common
Manipulator Common Interface Common Level. (See doc/manipulator_common_interface.pdf)
| Name | Direction | Type | Description |
|---|---|---|---|
| JARA_ARM_ManipulatorCommonInterface_Common | Provided | JARA_ARM::ManipulatorCommonInterface_Common |
ManipulatorCommonInterface_Middle
Manipulator Common Interface Middle Level (See doc/manipulator_common_interface.pdf)
| Name | Direction | Type | Description |
|---|---|---|---|
| JARA_ARM_ManipulatorCommonInterface_Middle | Provided | JARA_ARM::ManipulatorCommonInterface_Middle |
Configurations
| Name | Type | Default | Unit | Description |
|---|---|---|---|---|
| servoNum | int | 5 |
How To Build
Linux
$ git clone https://github.com/sugarsweetrobotics/VS_ASR_RTC $ cd VS_ASR_RTC $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create VS_ASR_RTC_test_project # You can also use other preinstalled package $ wasanbon-cd VS_ASR_RTC_test_project $ ./mgr.py repository clone VS_ASR_RTC $ ./mgr.py rtc build VS_ASR_RTC $ ./mgr.py rtc run VS_ASR_RTC # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Not available
Build in OSX
Not available
Build in Linux
Not available
Copyright
Saitama Univ. Design Lab.