Name
RoombaRTC
Brief
Roomba RTC
Description
RT Component for Controlling Roomba (iRobot). Roomba can be controlled by PCs with the serial interfaces. With Roomba 500 series, the top panel can be released and the DIN connector appears. If you want to know in more detial, please check Roomba Open Interface.
License
LGPL
Image
Language
C++
URL
https://github.com/sugarsweetrobotics/RoombaRTC.git
Platform
[‘osx’, ‘ubuntu’, ‘win’]
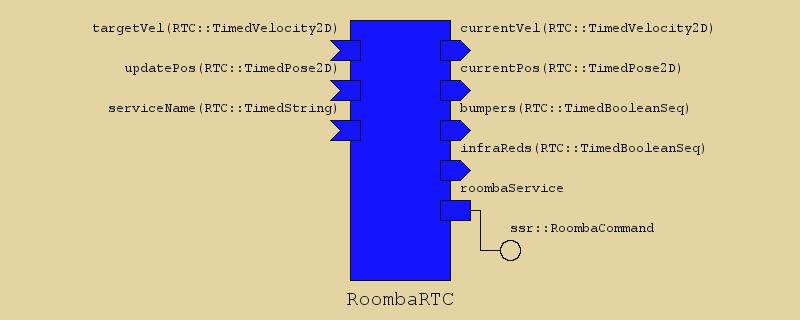
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| targetVel | RTC::TimedVelocity2D | Target velocity of Roomba. Unit is m/sec or rad/sec. | |
| updatePos | RTC::TimedPose2D | Position to be update. Input data to this port, then current position will be updated. | |
| serviceName | RTC::TimedString |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| currentVel | RTC::TimedVelocity2D | m/sec or radian/sec | This port outputs the current velocity of Roomba. |
| currentPos | RTC::TimedPose2D | meter or radian | This port outputs Current Position of Roomba. Roomba RTC always estimates its own position by odometry. |
| bumpers | RTC::TimedBooleanSeq | ||
| infraReds | RTC::TimedBooleanSeq |
Service Ports
roombaService
This service port provides Roomba’s command (mainly mode changes).
| Name | Direction | Type | Description |
| RoombaCommand | Provided | ssr::RoombaCommand | This service port provides Roomba’s command (mainly mode changes). |
Configurations
| Name | Type | Default | Unit | Description |
| model | string | 500series | ||
| serial_port | string | COM1 | ||
| baudrate | int | 115200 |
How To Build
Linux
$ git clone https://github.com/sugarsweetrobotics/RoombaRTC.git $ cd RoombaRTC $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create RoombaRTC_test_project # You can also use other preinstalled package $ wasanbon-cd RoombaRTC_test_project $ ./mgr.py rtc clone RoombaRTC $ ./mgr.py rtc build RoombaRTC $ ./mgr.py rtc run RoombaRTC # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Success (2015-01-23 10:25:44.139000)
Build in OSX
Success (2015-01-23 01:41:54.980649)
Build in Linux
Failed (2015-01-22 20:36:12.002153)
Copyright
Sugar Sweet Robotics