Name
Mapper_gmapping
Brief
Mapper RTC using gmapping
Description
License
Image
Language
C++
URL
https://github.com/ysuga/Mapper_gmapping.git
Platform
[‘osx’, ‘win’, ‘ubuntu’]
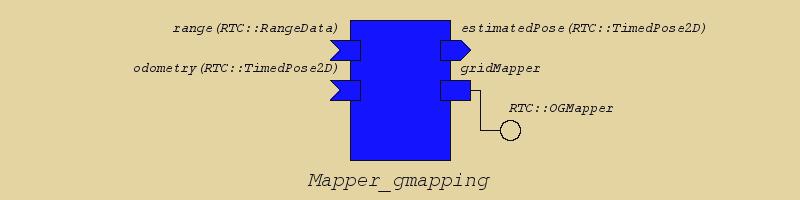
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| range | RTC::RangeData | ||
| odometry | RTC::TimedPose2D |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| estimatedPose | RTC::TimedPose2D |
Service Ports
gridMapper
| Name | Direction | Type | Description |
| OGMapper | Provided | RTC::OGMapper |
Configurations
| Name | Type | Default | Unit | Description |
| debug | int | 0 | ||
| sigma | float | 0.05 | The sigma used by the greedy endpoint matching | |
| kernelSize | int | 1 | The kernel in which to look for a correspondence | |
| lstep | float | 0.05 | The optimization step in translation | |
| astep | float | 0.05 | The optimization step in rotation | |
| iterations | int | 5 | The number of iterations of the scanmatcher | |
| lsigma | float | 0.075 | The sigma of a beam used for likelihood computation | |
| ogain | float | 3.0 | Gain to be used while evaluating the likelihood, for smoothing the resampling effects | |
| lskip | int | 0 | Number of beams to skip in each scan. | |
| minimumScore | float | 0.0 | Minimum score for considering the outcome of the scan matching good. Can avoid jumping pose estimates in large open spaces when using laser scanners with limited range (e.g. 5m). Scores go up to 600+, try 50 for example when experiencing jumping estimate issues. | |
| srr | float | 0.1 | Odometry error in translation as a function of translation (rho/rho) | |
| srt | float | 0.2 | Odometry error in translation as a function of rotation (rho/theta) | |
| str | float | 0.1 | Odometry error in rotation as a function of translation (theta/rho) | |
| stt | float | 0.05 | Odometry error in rotation as a function of rotation (theta/theta) | |
| linearUpdate | float | 1.0 | Process a scan each time the robot translates this far | |
| angularUpdate | float | 0.5 | Process a scan each time the robot rotates this far | |
| temporalUpdate | float | -1.0 | Process a scan if the last scan proccessed is older than the update time in seconds. A value less than zero will turn time based updates off. | |
| resampleThreshold | float | 0.5 | The Neff based resampling threshold | |
| particles | int | 30 | Number of particles in the filter | |
| xmin | float | -100 | Initial map size | |
| ymin | float | -100 | Initial map size | |
| xmax | float | 100 | Initial map size | |
| ymax | float | 100 | Initial map size | |
| delta | float | 0.05 | Processing parameters (resolution of the map) | |
| llsamplerange | float | 0.01 | Translational sampling range for the likelihood | |
| llsamplestep | float | 0.01 | Translational sampling step for the likelihood | |
| lasamplerange | float | 0.005 | Angular sampling range for the likelihood | |
| lasamplestep | float | 0.005 | Angular sampling step for the likelihood | |
| transform_publish_period | float | 0.05 | How long (in seconds) between transform publications. | |
| occ_thresh | float | 0.25 | Threshold on gmapping’s occupancy values. Cells with greater occupancy are considered occupied (i.e., set to 100 in the resulting sensor_msgs/LaserScan). | |
| throttle_scans | int | 1 | throttle_scans | |
| map_update_interval | float | 5.0 | How long (in seconds) between updates to the map. Lowering this number updates the occupancy grid more often, at the expense of greater computational load. |
How To Build
Linux
$ git clone https://github.com/ysuga/Mapper_gmapping.git $ cd Mapper_gmapping $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create Mapper_gmapping_test_project # You can also use other preinstalled package $ wasanbon-cd Mapper_gmapping_test_project $ ./mgr.py rtc clone Mapper_gmapping $ ./mgr.py rtc build Mapper_gmapping $ ./mgr.py rtc run Mapper_gmapping # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Success (2015-01-23 10:25:18.788000)
Build in OSX
Failed (2015-01-23 01:41:43.616129)
Build in Linux
Failed (2015-01-22 20:35:46.830327)
Copyright
ssr