Name
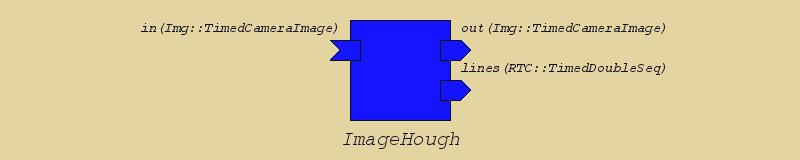
ImageHough
Brief
ImageHoughLines
Description
License
Image
Language
C++
URL
https://github.com/sugarsweetrobotics/ImageHough.git
Platform
osx10.9_xcode5
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| in | Img::TimedCameraImage |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| out | Img::TimedCameraImage | ||
| lines | RTC::TimedDoubleSeq | Lines Point Data format : Line k is defined by two points : (xk0, yk0) to (xk1, yk1) (if two lines, ) [x00, y00, x01, y01, x10, y10, x11, y11] |
Service Ports
Configurations
| Name | Type | Default | Unit | Description |
| mode | string | standard | ||
| rho | double | 1.0 | Distance resolution of the accumulator in pixels | |
| theta | double | 180 | Angle resolution of the accumulator in radians | |
| threshold | double | 100 | The accumulator threshold parameter. Only those lines are returned that get enough votes ( >\texttt{threshold} ) | |
| srn | double | 0 | For the multi-scale Hough transform it is the divisor for the distance resolution rho .The coarse accumulator distance resolution will be rho and the accurate accumulator resolution will be rho/srn . If both srn=0 and stn=0 then the classical Hough transform is used, otherwise both these parameters should be positive. | |
| stn | double | 0 | For the multi-scale Hough transform it is the divisor for the distance resolution theta |
How To Build
Linux
$ git clone https://github.com/sugarsweetrobotics/ImageHough.git $ cd ImageHough $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create ImageHough_test_project # You can also use other preinstalled package $ wasanbon-cd ImageHough_test_project $ ./mgr.py rtc clone ImageHough $ ./mgr.py rtc build ImageHough $ ./mgr.py rtc run ImageHough # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Failed (2015-01-23 10:24:55.716000)
Build in OSX
Success (2015-01-23 01:41:36.709668)
Build in Linux
Success (2015-01-22 20:36:25.631705)
Copyright
Sugar Sweet Robotics