Name
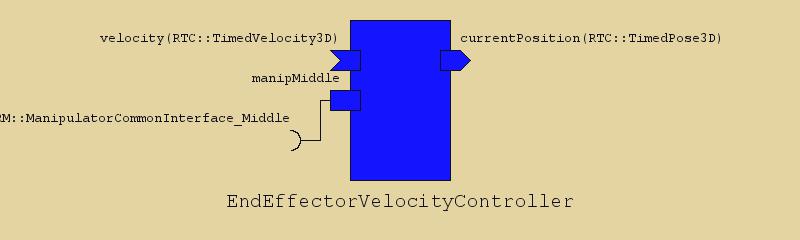
EndEffectorVelocityController
Brief
Control Manipulator with 3 dimension velocity
Description
License
Image
Language
Python
URL
https://github.com/sugarsweetrobotics/EndEffectorVelocityController
Platform
[‘osx’, ‘win’, ‘ubuntu’]
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| velocity | RTC::TimedVelocity3D |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| currentPosition | RTC::TimedPose3D |
Service Ports
manipMiddle
| Name | Direction | Type | Description |
|---|---|---|---|
| JARA_ARM_ManipulatorCommonInterface_Middle | Required | JARA_ARM::ManipulatorCommonInterface_Middle |
Configurations
| Name | Type | Default | Unit | Description |
|---|---|---|---|---|
| debug | int | 0 |
How To Build
$ git clone https://github.com/sugarsweetrobotics/EndEffectorVelocityController $ cd EndEffectorVelocityController $ mkdir build $ cd build $ cmake ../ $ make
How To Build in wasanbon
$ wasanbon-admin.py package create EndEffectorVelocityController_test_project # You can also use other preinstalled package $ wasanbon-cd EndEffectorVelocityController_test_project $ ./mgr.py repository clone EndEffectorVelocityController $ ./mgr.py rtc build EndEffectorVelocityController $ ./mgr.py rtc run EndEffectorVelocityController # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Not available
Build in OSX
Not available
Build in Linux
Not available
Copyright
Sugar Sweet Robotics