Name
NAO_python
Brief
NAO RT Component
Description
Aldebaran Robotics NAO / Pepper RT-Component using NAOqi. To use this, install naoqi python SDK version 2.*. Before launch NAO.py, build_idl.sh (bat) must be used to build idl file.
License
GPL ver3
Image
Language
Python
URL
https://github.com/ogata-lab/NAO.git
Platform
[‘osx’, ‘ubuntu’]
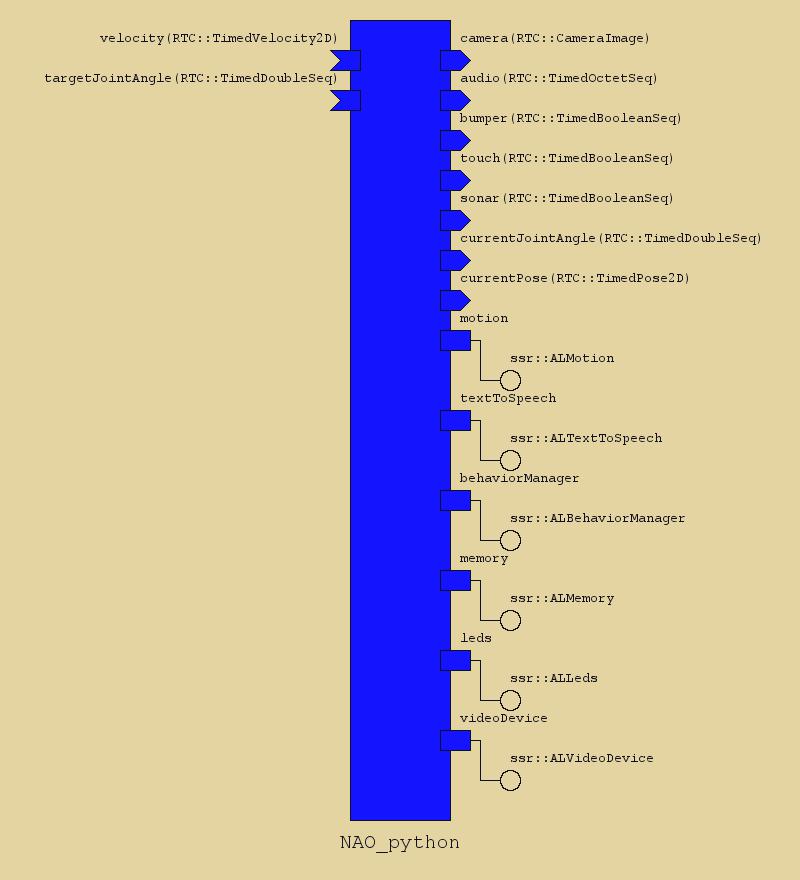
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| velocity | RTC::TimedVelocity2D | Target Velocity for locomotion. | |
| targetJointAngle | RTC::TimedDoubleSeq | Target Angle Position of Joints. The controlled joints are defined in the configuration (controlling_joint_names). |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| camera | RTC::CameraImage | Camera Image. To switch camera, use the configuration (camera_id). | |
| audio | RTC::TimedOctetSeq | Audio Data . To switch configuration will change the data alignment. | |
| bumper | RTC::TimedBooleanSeq | bumper data. This data is sequence. Alignment is (lfoot_left, lfoot_right, rfoot_left, rfoot_right) | |
| touch | RTC::TimedBooleanSeq | touch detection (head_back, head_center, head_front, rhand_back, rhand_center, rhand_front, lhand_back, lhand_center, lhand_front) | |
| sonar | RTC::TimedBooleanSeq | sonar detection, (left, right) | |
| currentJointAngle | RTC::TimedDoubleSeq | Current joint position. The observing joints are defined in the configuration of observing_joint_names. | |
| currentPose | RTC::TimedPose2D | Current Position of locomotion. The current position is calculated odometry. In NAO, the footsteps. the Pepper, encoders. When this RTC is activated, the position is initialized as (0, 0, 0). |
Service Ports
motion
| Name | Direction | Type | Description |
|---|---|---|---|
| ALMotion | Provided | ssr::ALMotion |
textToSpeech
| Name | Direction | Type | Description |
|---|---|---|---|
| ALTextToSpeech | Provided | ssr::ALTextToSpeech |
behaviorManager
| Name | Direction | Type | Description |
|---|---|---|---|
| ALBehaviorManager | Provided | ssr::ALBehaviorManager |
memory
| Name | Direction | Type | Description |
|---|---|---|---|
| ALMemory | Provided | ssr::ALMemory |
leds
| Name | Direction | Type | Description |
|---|---|---|---|
| ALLeds | Provided | ssr::ALLeds |
videoDevice
| Name | Direction | Type | Description |
|---|---|---|---|
| ALVideoDevice | Provided | ssr::ALVideoDevice |
Configurations
| Name | Type | Default | Unit | Description |
|---|---|---|---|---|
| ipaddress | string | nao.local | IP address of NAO/Pepper. If your PC has Bonjour (avahi), you can use the name of nao. (ex., nao.local) | |
| port | int | 9559 | Port of naoqi server. Default value is 9559. Some simulation environment provides other port number. See the manual of them. | |
| debug | int | 1 | To view more informoation on console, set 1. | |
| camera_id | int | 0 | Camera ID of NAO. 0 = Top, 1 = Bottom. | |
| num_channel | int | 1 | The number of audio channel. NAO has 4 microphones. You can use 1, 2, 4 values. | |
| interleaved | int | interleeved | Is audio interleaved or not. 0 = not interleaved. 1 = interleaved. | |
| num_samples | int | 16000 | Sampling num. | |
| channel_name | string | front | Names of Audio channels | |
| enable_camera | int | 0 | Camera ON/OFF. If 1, the RTC will connect vision interface to naoqi server. If 0, this RTC will not connect the vision interface. | |
| enable_audio | int | 0 | Audio (includes TextToSpeech) ON/OFF. If 1, the RTC will connect audio interface to naoqi server. If 0, this RTC will not connect the audio interface. | |
| orthogonal_security_distance | string | 0.1 | Security distance for locomotion on orthogonal (front) direciton. If some obstacle is detected in the direction and the distance between the robot and the obstact is less than this value, the robot can not move toward the object. | |
| tangential_security_distance | string | 0.1 | Security distance for locomotion on tangential (-90 to 90) direciton. If some obstacle is detected in the front 180 degree space and the distance between the robot and the obstact is less than this value, the robot can not move toward the object. | |
| controlling_body_names | string | HeadYaw, HeadPitch, LShoulderPitch, LShoulderRoll, LElbowYaw, LElbowRoll, LWristYaw, LHand, HipRoll, HipPitch, KneePitch, RShoulderPitch, RShoulderRoll, RElbowYaw, RElbowRoll, RWristYaw, RHand | This value must be the list of the joint name. The joint name is defined in the NAO/Pepper. See their manual to know the names.
If you set this value “HeadYaw, HeadPitch”, the data package received in the targetJointAngle port will change the angles of the joints. Comma separation. Never use [ and ]. |
|
| observing_body_names | string | HeadYaw, HeadPitch, LShoulderPitch, LShoulderRoll, LElbowYaw, LElbowRoll, LWristYaw, LHand, HipRoll, HipPitch, KneePitch, RShoulderPitch, RShoulderRoll, RElbowYaw, RElbowRoll, RWristYaw, RHand | This value must be the list of the joint name. The joint name is defined in the NAO/Pepper. See their manual to know the names.
If you set this value “HeadYaw, HeadPitch”, the data packet sent from the currentJointAngle port means the angles of the joints. Comma separation. Never use [ and ]. |
How To Build
$ git clone https://github.com/ogata-lab/NAO.git $ cd NAO_python $ mkdir build $ cd build $ cmake ../ $ make
How To Build in wasanbon
$ wasanbon-admin.py package create NAO_python_test_project # You can also use other preinstalled package $ wasanbon-cd NAO_python_test_project $ ./mgr.py repository clone NAO_python $ ./mgr.py rtc build NAO_python $ ./mgr.py rtc run NAO_python # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Not available
Build in OSX
Success (2015-01-23 01:41:51.540028)
Build in Linux
Not available
Copyright
Ogata Lab Waseda Univ.