Name
RTCKinect
Brief
RTC Kinect 4 Windows
Description
License
Image
Language
C++
URL
https://github.com/sugarsweetrobotics/Kinect4Win.git
Platform
[‘win’]
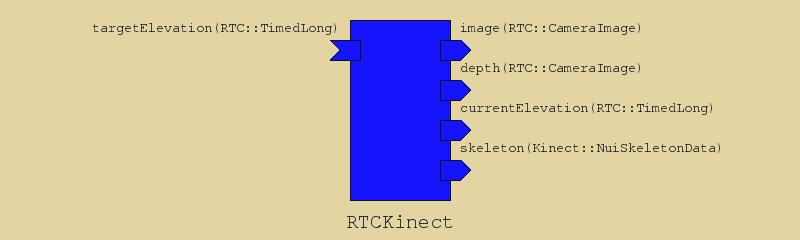
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| targetElevation | RTC::TimedLong |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| image | RTC::CameraImage | Camera Color Image | |
| depth | RTC::CameraImage | Depth Image | |
| currentElevation | RTC::TimedLong | ||
| skeleton | Kinect::NuiSkeletonData |
Service Ports
Configurations
| Name | Type | Default | Unit | Description |
| debug | int | 0 | ||
| enable_camera | int | 1 | ||
| enable_depth | int | 1 | ||
| camera_width | int | 640 | ||
| camera_height | int | 480 | ||
| depth_width | int | 320 | ||
| depth_height | int | 240 | ||
| player_index | int | 0 |
How To Build
Linux
$ git clone https://github.com/sugarsweetrobotics/Kinect4Win.git $ cd RTCKinect $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create RTCKinect_test_project # You can also use other preinstalled package $ wasanbon-cd RTCKinect_test_project $ ./mgr.py rtc clone Kinect4Win $ ./mgr.py rtc build RTCKinect $ ./mgr.py rtc run RTCKinect # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Not available
Build in OSX
Not available
Build in Linux
Not available