「wasanbon」は,ロボット用ソフトウェアプラットフォーム「OpenRTM-aist」の機能,とくにシステム単位での再利用性を促進するためのフレームワークです.
wasanbonは以下の機能を提供します.
- シンプルなコンソールツールによるRTシステム管理
- RTコンポーネントのリポジトリ管理
- RTシステムのリポジトリ管理
- バージョン管理
- RTシステムの統合実行管理
wasanbonによってRT (Robot Technology) システム開発をシンプルにしましょう.
RTミドルウェアとOpenRTM-aist
ロボットはアクチュエータやセンサ,知能アルゴリズムなどのソフトウェアモジュールなどの,「ロボット技術要素」の塊です.RTミドルウェア (Robot Technology Middleware, RTM) は,そんなRT要素を組み合わせてロボットシステムを構築するためのソフトウェアプラットフォーム技術の標準規格であり,ロボット開発を素早く,信頼性が高く,そして楽しいものにします.
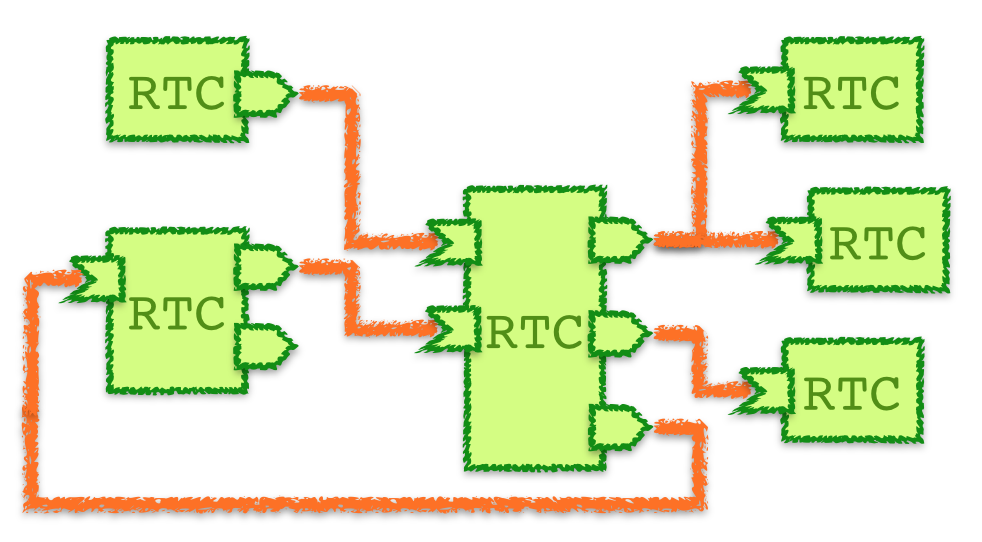
RTミドルウェアでは特にロボットのソフトウェアに着目しています.機能要素 (アクチュエータの制御ソフトウェア,センシング用ソフトウェア,知能アルゴリズム) は「RTコンポーネント, RTC」と呼ばれ,ロボットはこのRTCを収集・接続することで実現することになります.
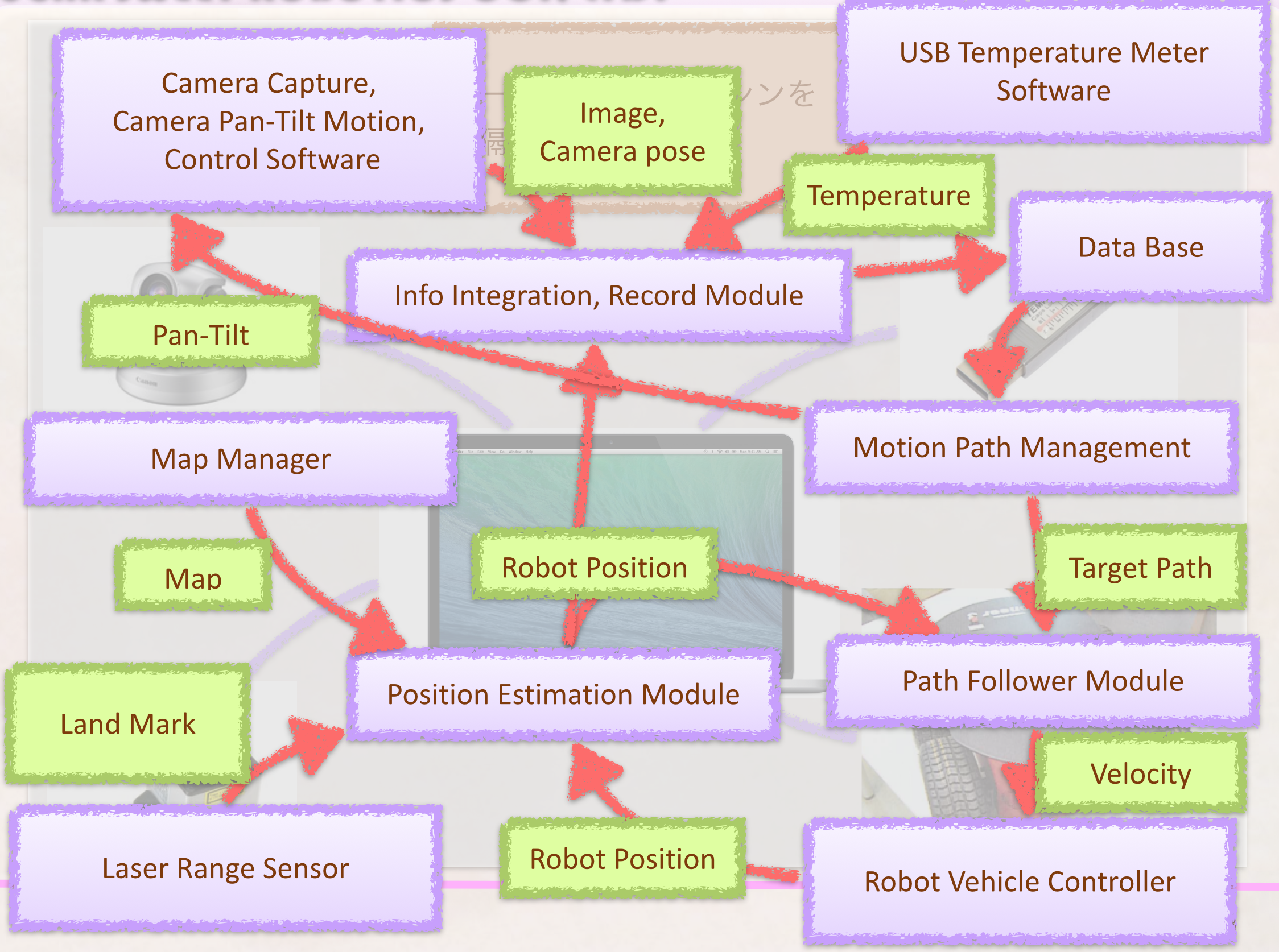
RTCはポートという他のRTCと通信するエンドポイントを有しており,これを「接続」することで「RTシステム」を構築することができます.
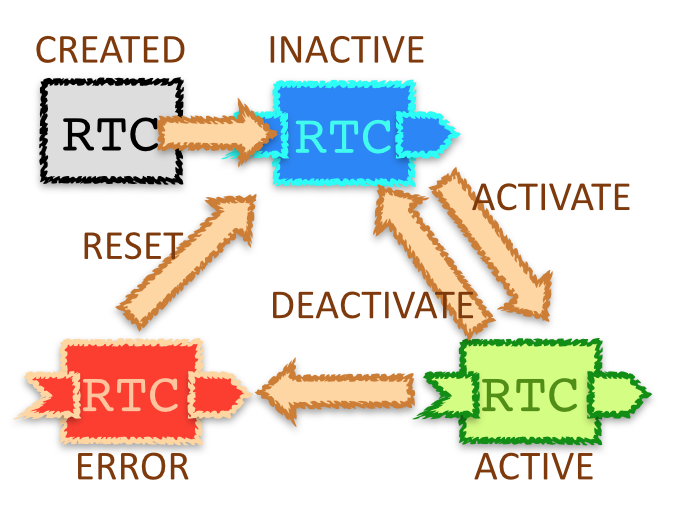
また,RTCはロボットのハードウェアを管理するためにも状態マシンが定義されております.
上記のようにRTミドルウェアはあくまでも標準規格の総称であり,幾つかの実装があります.OpenRTM-aistは産業技術総合研究所によって開発されたもっとも人気のある実装です.
RTミドルウェアやOpenRTM-aistについては公式ウェブサイトをごらんください.
参考:
ysuga.net
OpenRTM-aist official
wasanbonについて
wasanbonはRTミドルウェアを使ったロボット用分散制御ソフトウェア開発を応援します.RTCを探して収集するのが面倒だと思いませんか?ソフトウェアコンポーネントや,ロボットシステム全体に関するドキュメントを構築するのが面倒だと思いませんか?wasanbonは未だ発展途上のツールですが,SUGAR SWEET ROBOTICSでも使っている,RTミドルウェア開発支援ツールです.
RTCおよびRTシステムの収集
wasanbonはRTコンポーネントのソースコードをgithub.comなどのリポジトリから収集する手助けをします.wasanbonで管理されているRTコンポーネントのリストはこちらです.
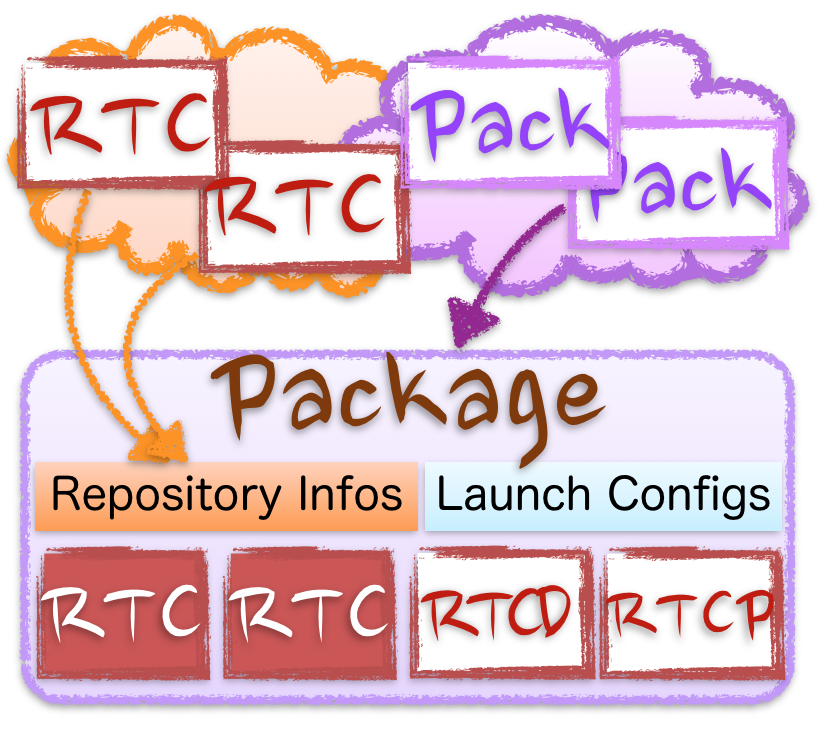
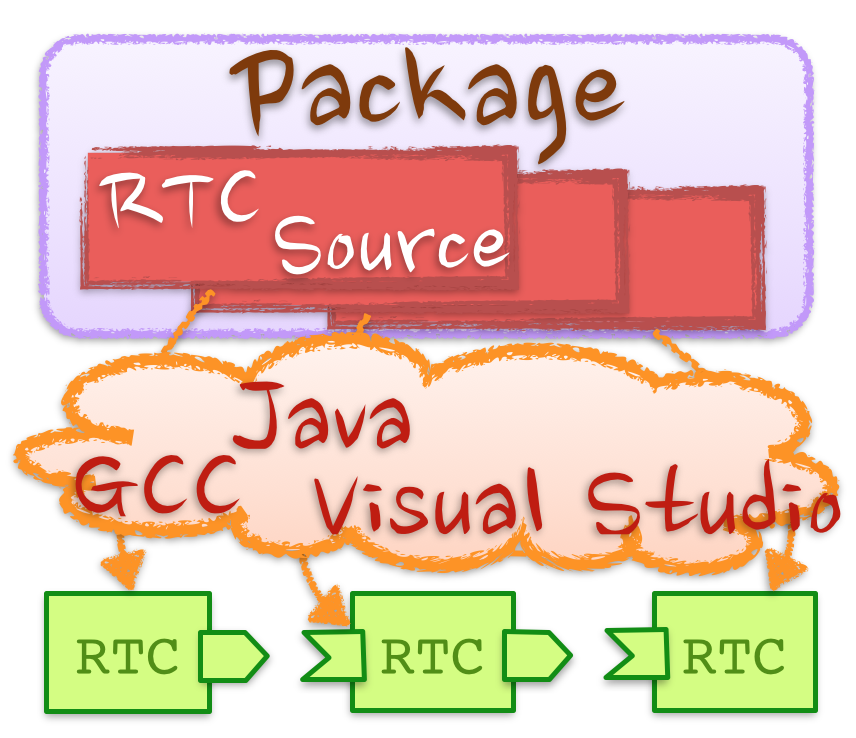
wasanbonはまたRTシステム全体での配布・収集をサポートしております.これを「パッケージ」と呼んでいます.パッケージはそれぞれ,RTコンポーネントのリポジトリ情報に加え,システムの接続情報や,コンフィグレーション情報を保持しております.パッケージをクローンすれば,芋づる式にRTコンポーネントも収集できてしまいます.
ビルド・コンフィグ,そして実行
wasanbonはシンプルなコンソールからのビルドをサポートしています.ただ,「mgr.py rtc build $YOUR_RTC」とタイプするだけです.
ビルドが成功すると,生成されたバイナリは自動的にシステムでの実行用にコンフィグされます.
OpenRTM-aistはRTC-daemonというRTコンポーネントの複数同プロセスで実行する仕組みを提供しており,この設定がなされます.
RTC-daemonを使えば,複数のRTコンポーネントが1プロセスで実行されるため,メモリなどのリソースの消費を抑える他,通信のオーバーヘッドも軽減されます.
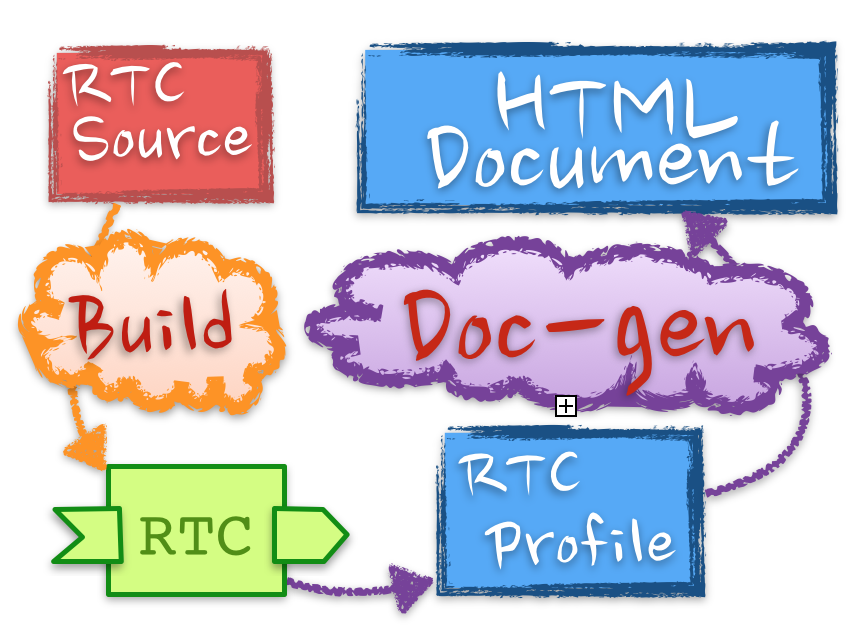
ドキュメント生成
wasanbonはドキュメント生成プロセスをサポートしています.RTコンポーネントのドキュメントは,設計時に作成したxmlドキュメントに加え,開発後に出来上がったバイナリを実行した際の情報を収集し,マージした形で生成できます.このため,たとえプログラマーが開発時にソースコードを変更し,設計ドキュメントとの違いが生まれた場合においても,ドキュメントの正当性が自動的に保管される仕組みが提供されています.
wasanbon.orgで管理下にあるRTコンポーネントのドキュメントを閲覧することができます.是非,ご覧ください.
一応・・・
wasanbon (わさんぼん,和三盆)は,日本のお砂糖の名前です (Wikipedia).
