Name
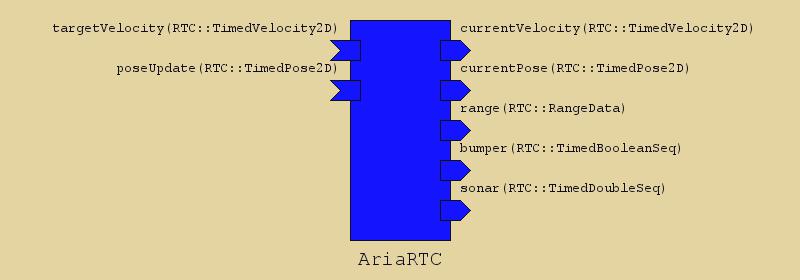
AriaRTC
Brief
Mobile Robots ARIA library avialble robot RT-component
Description
MobileRobot ARIA library RT-component. Basically, Mobile Robot controller, but the library also available to control laser sensors. To use this RTC, ARIA library must be installed manually (http://robots.mobilerobots.com/wiki/ARIA)
License
GPLv3
Image
Language
C++
URL
https://github.com/sugarsweetrobotics/AriaRTC.git
Platform
[‘win’, ‘ubuntu’]
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| targetVelocity | RTC::TimedVelocity2D | Target Velocity of Mobile Robot (vx, vy, vz) in robot coordinate | |
| poseUpdate | RTC::TimedPose2D | If you want to update the internal value of current pose of mobile robot (in global coordinates), put data to this port. |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| currentVelocity | RTC::TimedVelocity2D | Current Velocity of Mobile Robot (In robot coordinate) | |
| currentPose | RTC::TimedPose2D | meter, radian | Current Pose estimated with Robot (usually odometry) in global coordinates. |
| range | RTC::RangeData | Ranger Sensor if robot is implemented | |
| bumper | RTC::TimedBooleanSeq | Bump Sensors if implemented. The order of sensor is same as the robot itself. Check the order with demo.exe program. If true, collide. If false, not collide. With the configuration bump policy will change the data sending policy. Please see it. | |
| sonar | RTC::TimedDoubleSeq | meter | Sonar Output (distance of each sensor) |
Service Ports
Configurations
| Name | Type | Default | Unit | Description |
| debug | int | 0 | ||
| robotPort | string | COM1 | Serial Port of Robot. | |
| robotPortType | string | serial | Type of Robot Connection. tcp or serial is available | |
| robotTcpPort | string | 8101 | TCP Port number of Robot Connection. If robotPortType is tcp, this value will be used. | |
| robotTcpAddress | string | localhost | Tcp address of robot to be connected. If robotPortType is tcp, this will be used. | |
| laserPort | string | COM2 | Serial port number of laser sensor. If laserPortType is serial, this will be used. | |
| laserPortType | string | serial | Connection type of laser sensor. tcp or serial is available. | |
| laserType | string | none | Laser sensor type. Available value is none (for no sensor), urg2.0 (Hokuyo URG 04LX SCIP2.0 protocol), lms2xx (SICK LMS200 series), lms1xx (SICK LMS100 series). | |
| laserTcpPort | string | 8102 | If laserPortType is tcp, robot and laser is remotely connected. This value defines the tcp port of remote laser. | |
| bumperSendingPolicy | string | event | Bumper data send policy. If event, the data is sent when the bumper state is changed. If continuous, every on_execute time the data is sent. | |
| commandTimeout | int | 3 | The interval of timeout. If the targetVelocity is not sent for this interval, the robot rtc will go to error state and stop maneuvour. | |
| odometryUpdateInterval | double | 0.5 | sec | This value indicates the maximum interval of odometry (currentPose) output. This RTC measures the current position of this robot, but if no difference to the previous position is seen, this robot do not output the value. If this value is set, RTC output the position if the output is resumed until this interval. If this value is negative, RTC do not output until the difference is seen. |
| initial_pose_x | double | 0.0 | meter | Initial Pose (x) |
| initial_pose_y | double | 0.0 | meter | Initial Pose (y) |
| initial_pose_z | double | 0.0 | meter | Initial Pose (z) |
How To Build
Linux
$ git clone https://github.com/sugarsweetrobotics/AriaRTC.git $ cd AriaRTC $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create AriaRTC_test_project # You can also use other preinstalled package $ wasanbon-cd AriaRTC_test_project $ ./mgr.py rtc clone AriaRTC $ ./mgr.py rtc build AriaRTC $ ./mgr.py rtc run AriaRTC # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Not available
Build in OSX
Not available
Build in Linux
Not available
Copyright
SUGAR SWEET ROBOTICS