Name
EKFRTC
Brief
Extended Kalman Fileter RTC
Description
License
Image
Language
C++
URL
https://github.com/sugarsweetrobotics/EKFRTC.git
Platform
[‘win’, ‘osx’]
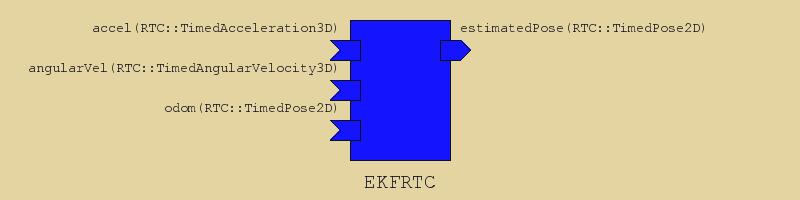
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| accel | RTC::TimedAcceleration3D | ||
| angularVel | RTC::TimedAngularVelocity3D | ||
| odom | RTC::TimedPose2D |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| estimatedPose | RTC::TimedPose2D |
Service Ports
Configurations
| Name | Type | Default | Unit | Description |
| debug | int | 0 | ||
| odom_cov_matrix | string | [1,0,0,0,0,0, 0,1,0,0,0,0, 0,0,1,0,0,0, 0,0,0,1,0,0, 0,0,0,0,1,0, 0,0,0,0,0,1] | ||
| imu_cov_matrix | string | [1,0,0,0,0,0, 0,1,0,0,0,0, 0,0,1,0,0,0, 0,0,0,1,0,0, 0,0,0,0,1,0, 0,0,0,0,0,1] |
How To Build
Linux
$ git clone https://github.com/sugarsweetrobotics/EKFRTC.git $ cd EKFRTC $ mkdir build $ cd build $ cmake ../ $ makeWindows
Download ZIP file from the website, and use CMake to generate VC2010 project. Then, open the project and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create EKFRTC_test_project # You can also use other preinstalled package $ wasanbon-cd EKFRTC_test_project $ ./mgr.py rtc clone EKFRTC $ ./mgr.py rtc build EKFRTC $ ./mgr.py rtc run EKFRTC # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Not available
Build in OSX
Not available
Build in Linux
Not available
Copyright
Sugar Sweet Robotics