Name
ARDrone
Brief
ARDrone Control RT Component
Description
ARDrone Controller RT-component written in Java. Control from remote PC. This RTC source code depends on ARDroneForP5.jar (https://github.com/shigeodayo/ARDroneForP5)
License
GPL
Image
Language
Java
URL
https://github.com/sugarsweetrobotics/ARDrone.git
Platform
[‘osx’, ‘win’]
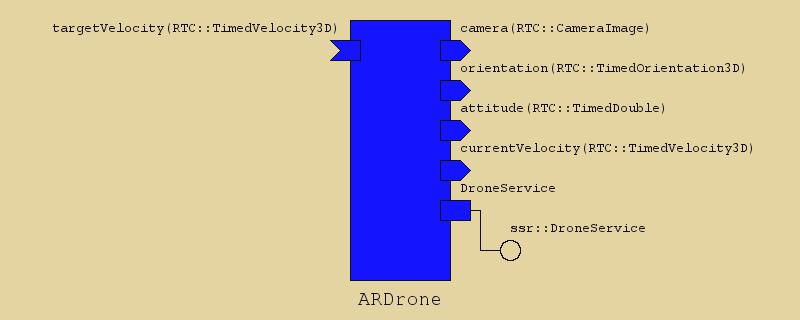
Data In Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| targetVelocity | RTC::TimedVelocity3D | Three dimensional velocity. ARDrone is not implemented to realize pitch and yaw velocity. |
Data Out Ports
| Name | Type | Unit | Description |
|---|---|---|---|
| camera | RTC::CameraImage | Camera Image taken by ARDrone. Camera can be switched by configuration value. | |
| orientation | RTC::TimedOrientation3D | rad | Orientation of ARDrone. |
| attitude | RTC::TimedDouble | m | Attitude of ARDrone. This value is measured by the ultrasonic sensor mounted on the bottom of the ARDrone. |
| currentVelocity | RTC::TimedVelocity3D | m/sec, rad/sec | Current Velocity of ARDrone. |
Service Ports
DroneService
null
| Name | Direction | Type | Description |
| DroneService | Provided | ssr::DroneService | Drone Service. mainly for take-off and landing. |
Configurations
| Name | Type | Default | Unit | Description |
| velocityGainTranslation | double | 1.0 | ||
| velocityGainRotation | double | 1.0 | ||
| use_camera | string | vertical | ||
| ipAddress | string | 192.168.1.1 |
How To Build
Please import .project by Eclipse IDE and build it.
How To Build in wasanbon
$ wasanbon-admin.py package create ARDrone_test_project # You can also use other preinstalled package $ wasanbon-cd ARDrone_test_project $ ./mgr.py rtc clone ARDrone $ ./mgr.py rtc build ARDrone $ ./mgr.py rtc run ARDrone # To Run RTC
Profile Status
Not available
Build Status
Build in Windows
Success (2015-01-23 10:24:24.562000)
Build in OSX
Success (2015-01-23 01:41:28.953074)
Build in Linux
Not available
Copyright
Sugar Sweet Robotics